Joral analog position sensors are available with custom angles and voltage ranges. Compared to the traditional potentiometer, Joral analog position sensors do not contain any contacting parts, and do not wear out like a potentiometer’s wiper blade. The fully customizable voltage or current output is available in both clockwise or counter-clockwise outputs.

Incremental output provides count and direction information through pulses and a phase shift between output channels A and B. Channel A leads channel B at a clockwise rotation of the magnet by 90 degrees, while channel B leads channel A at a counter-clockwise rotation. In addition, an index output is provided once per rotation. The incremental output can be a single-ended (A, B, and Z) or differential output (A, B, Z, and A’ B’ Z’).

Joral analog position sensors are available with custom angles and voltage ranges. Compared to the traditional potentiometer, Joral analog position sensors do not contain any contacting parts, and do not wear out like a potentiometer’s wiper blade. The fully customizable voltage or current output is available in both clockwise or counter-clockwise outputs.
Figure left shows an example analog output with angle range from 0-180° and a voltage range from 0-5v. As the sensor spans the range of 180° the output voltage will indicate the angle of the sensor shaft.
After the sensor spans 0-180° the output will remain steady until it hits the breakpoint (BP). The breakpoint (BP) is a customizable feature of the Joral analog, and is used to reset the output to allow measurement of the next rotation.

Joral’s J1939 encoder uses the industry standard J1939 CAN Bus interface to function equally as an angular position sensor, RPM sensor and counting encoder. All data is updated and transmitted through status messages every 50 milliseconds. Various settings can also be sent to the encoder, such as home position, expected RPM rate, and counter reset.
The image to the right is an example of the ProxEncoder® non-contact rotary encoder J1939 message structure. For detailed program instructions, data sheets, and message structures check out the PE18 product page or consult Joral.
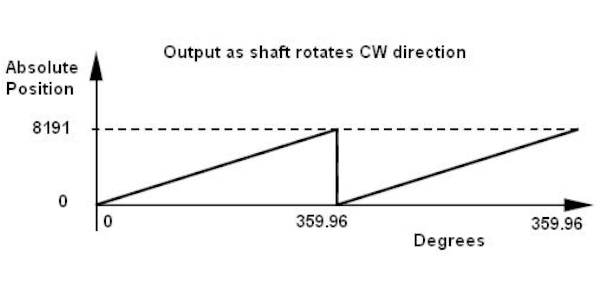
Synchronous Serial Interface (SSI) provides serial output data to the computer upstream in 13 bits as it reads the CLOCK and DATA signals to interpret the absolute position of the shaft from the encoder. Absolute position value varies from 0 to 8191, corresponding to 0 to 359.96 degrees of rotation.
The Joral PWM (Pulse Width Modulation) output provides a signal that is proportional to the absolute angular position of the encoder. The output value divides the 360 degrees into 10 bits providing 1024 unique angular positions, which is 0.351 degrees per bit. This output is perfect for connection to a microproccesor. Each bit is represented by a 1 us of on time. Encoder angle is calculated by the ratio of on time to total signal time.

